← ana sayfa
Mezuniyet Projesi
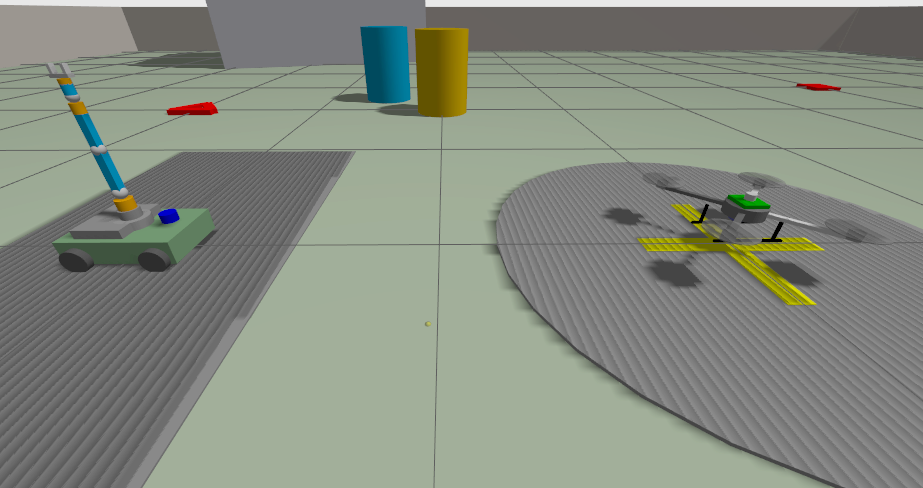
LLM Tabanlı Çoklu Robot Kontrol Sistemi
Quadcopter drone, paletli UGV ve 6-DOF robot kol içeren heterojen robot filosunu doğal dil komutlarıyla yöneten sistem. Gazebo Fortress'te simülasyon, ROS 2 mimarisi, OpenCV ile nesne tespiti.
ROS 2Gazebo FortressLlama 3.1 8BOllamaOpenCVPythonLiDAR